Hydroglisseur tri moteur radiocommandé
![]()
![]()
L'hydroglisseur créé précédemment est opérationnel. Lors de son utilisation, Philippe a réussi sans difficulté à le placer sur des cailloux qui affleuraient la surface du plan d'eau sur lequel nous évoluions. Un bon bain de pieds pour aller récupérer l'hydroglisseur. Cette situation a amené une discussion sur la nécessité d'avoir une marche arrière qui permettrait sans doute de se sortir de ce genre de situation.
Recherche sur Internet, et j'ai trouvé plusieurs vidéos de modèles réalisés pour assurer la récupération d'autres bateaux en perdition sur un plan d'eau. Le site ANEWTON.NET présente la réalisation d'un hydroglisseur avec trois moteurs (marche avant et arrière) et donne quelques explications sur les mixages à réaliser sur la radiocommande.
Le prototype.
C'est le flotteur du prototype du précédent hydroglisseur qui sera réutilisé pour les essais du modèle avec trois moteurs.

Les composants d'un autre multi rotor démantelé seront utilisés pour la réalisation de ce nouvel appareil.
Le GAUI 330X présenté dans une autre page de ce site va commencer une nouvelle vie.
La première étape avant toute construction, va être de procéder au paramétrage de l'ensemble radiocommandé, et plus particulièrement de la gestion des trois moteurs. Deux pour assurer la propulsion vers l'avant et la direction, et un pour assurer le freinage et la marche arrière.
Mon premier choix sera d'utiliser la radiocommande HITEC OPTIC 6. Malgré mes multiples tentatives, je ne suis pas arrivé à faire ce que je voulais. Je me suis donc orienté vers ma radiocommande HITEC AURORA 9, qui est plus sophistiquée dans les possibilités de paramétrage. Cela ne veut pas dire que c'était impossible avec l'OPTIC 6, mais simplement que je n'y suis pas arrivé dans un délai raisonnable.
Dans les vidéos présentées sur ANEWTON.NET, la radiocommande est en mode 2, et il utilise le manche de droite (cyclique latéral/aileron et cyclique longitudinal/profondeur) pour la gestion des 3 moteurs avec mixage pour la direction. Les 3 moteurs ne peuvent pas fonctionner simultanément.
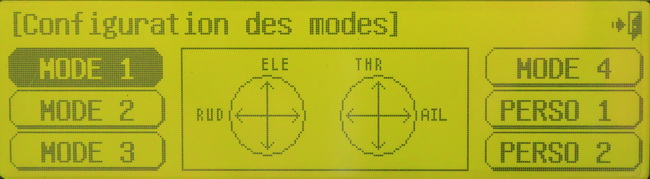
J'ai conservé le mode 1 que j'utilise sur l'ensemble de mes modèles (avion, cerf-volant radiocommandé, multi rotor, char à voile radiocommandé).
Le manche de droite (gaz/aileron) sera utilisé pour la marche avant et la direction avec deux moteurs. Le manche de gauche (profondeur) pour la marche arrière. La marche arrière est activée du neutre du manche de gauche (centre) en déplaçant ce manche vers l'arrière.
Bien sûr il faut calibrer chaque ESC (contrôleur) avec chaque moteur pour enregistrer le mini et le maxi du débattement du manche. Attention donc, pour le contrôleur moteur dédié à la marche arrière, à faire ce calibrage du neutre (mini) vers le bas (maxi).
Attention également au branchement des contrôleurs sur le module de réception. Un seul contrôleur conserve les trois fils pour être connecté au module de réception, il faut enlever le fil rouge sur les deux autres contrôleurs. Soit à la sauvage, ce que je déconseille, en coupant ledit fil rouge, soit en retirant à l'aide d'une épingle le fil rouge du connecteur et en l'isolant avec un adhésif électrique ou de la gaine thermo.
Pour ma part avec la radiocommande HITEC AURORA 9, son module d'émission SPECTRA, et le module de réception HITEC OPTIMA, j'utilise la fonction SPC qui permet d'alimenter le module de réception directement à partir de l'accu de propulsion (jusqu'à 35 volts). La fonction télémétrie me permet ainsi d'avoir sur la radiocommande le niveau de l'accu de propulsion et l'alarme de fin d'autonomie.
Paramétrage de la radiocommande HITEC AURORA 9
En mode 1 et version firmware 1.09(0)


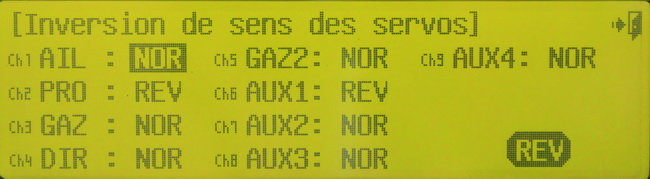
Le modèle est de type avion 1 aile et 2 moteurs.

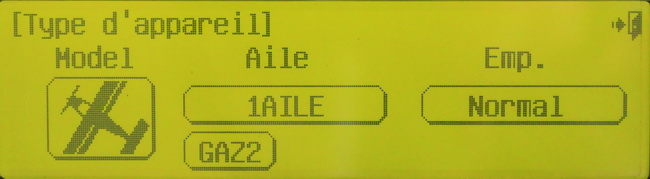
Le choix GAZ2 (deux moteurs), affecte le manche de gaz à la voie 3 mixée automatiquement avec la voie 5. Les contrôleurs des deux moteurs pour le déplacement vers l'avant seront donc connectés sur les voies 3 et 5. Le moteur destiné à la marche arrière sera lui connecté sur la voie 2 (profondeur).
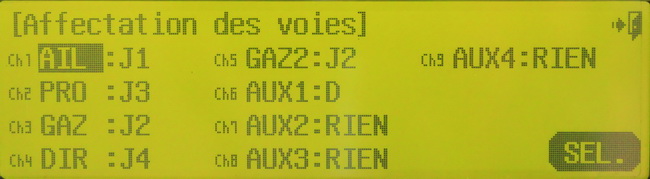
Sur mon hydroglisseur j'ai installé une corne de brume, elle est connectée sur la voie 6 (AUX 1) affectée à l'interrupteur tout ou rien (D).

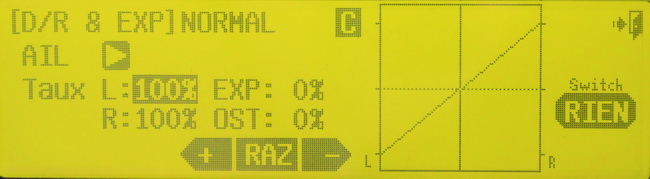
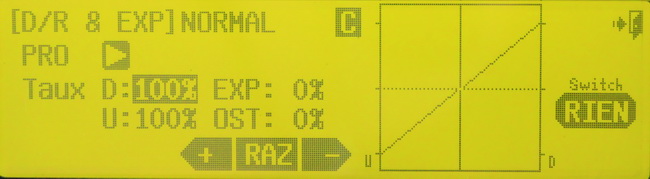
Rien de particulier pour D/R et EXP.

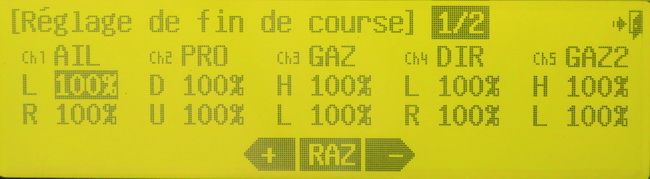
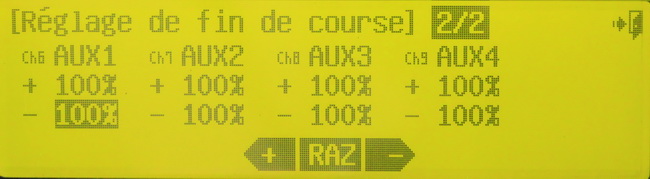
Rien de particulier pour fin de course.
Courbe de gaz classique identique pour chaque moteur. Il s'agit bien sûr des deux moteurs dédiés au déplacement vers l'avant. Évidemment les contrôleurs et moteurs sont du même modèle.


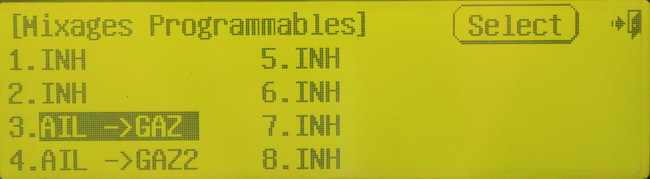
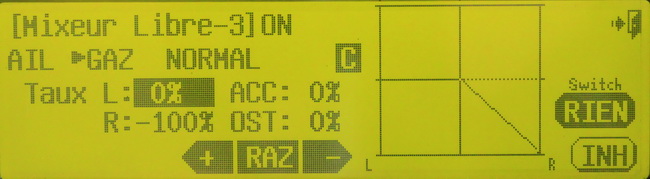
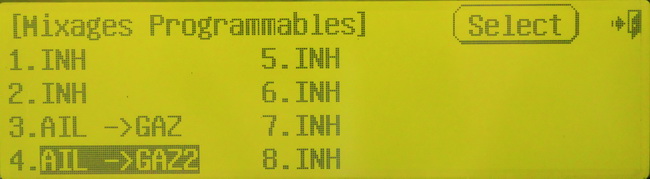
Création de deux mixages pour aileron et gaz, et aileron et gaz2. C'est ce qui permettra de virer à droite ou à gauche en modifiant respectivement la vitesse des moteurs gauche et droite.
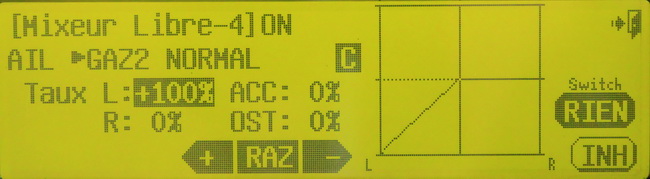
Le fonctionnement sera le suivant. Le manche de gauche (profondeur) basculé du neutre (centre) vers le bas démarre le moteur dédié à la marche arrière. Le retour du manche au neutre le moteur s'arrête. Attention, la fonction de verrouillage du moteur sur la radiocommande est inopérante sur ce moteur, elle ne concerne que ceux qui sont gérés par le manche de gaz.
Les images ci-dessous correspondent à l'action sur le manche de profondeur et la visualisation sur l'écran moniteur de la radiocommande.

NEUTRE EN BAS
Le manche de gaz tout droit vers le haut les deux moteurs démarrent et permettent le déplacement vers l'avant en ligne droite. En actionnant en même temps ce manche vers la droite, la vitesse du moteur de droite est réduite jusqu'à l'arrêt complet de ce moteur. La poussée du moteur de gauche qui lui continue de tourner à la vitesse produite par le déplacement vertical du manche de gaz permet d'orienter l'hydroglisseur vers la droite. L'action du manche de gaz vers le haut et vers la gauche provoque l'action inverse. Cela permet ainsi de virer pratiquement sur place.
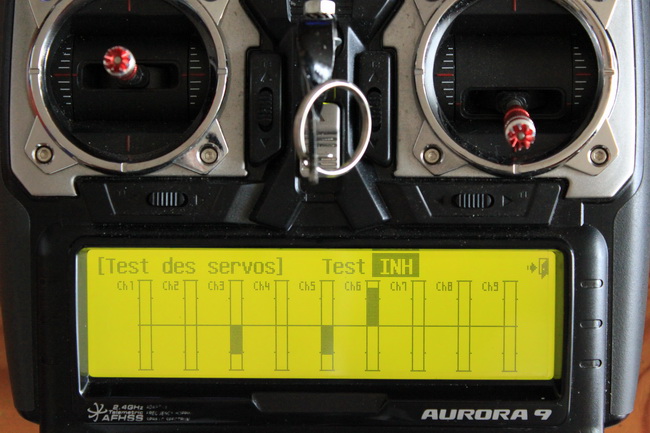
Les images ci-dessous correspondent à l'action sur le manche de gaz et la visualisation sur l'écran moniteur de la radiocommande.

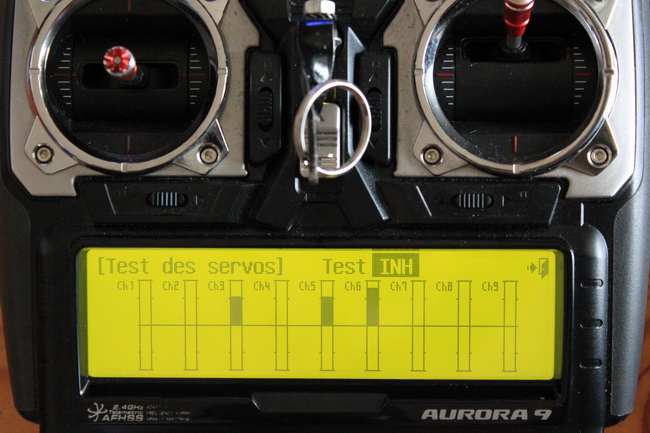

MI GAZ ET GAUCHE GAZ MAXI MI GAZ ET DROITE
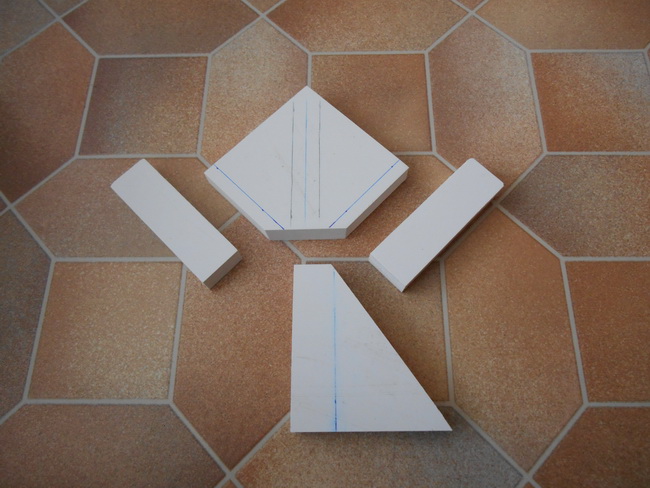
Pour la fabrication du support de l'ensemble de propulsion, j'ai utilisé des équerres en plastique et du PVC rigide expansé (FOREX ou KOMACEL).
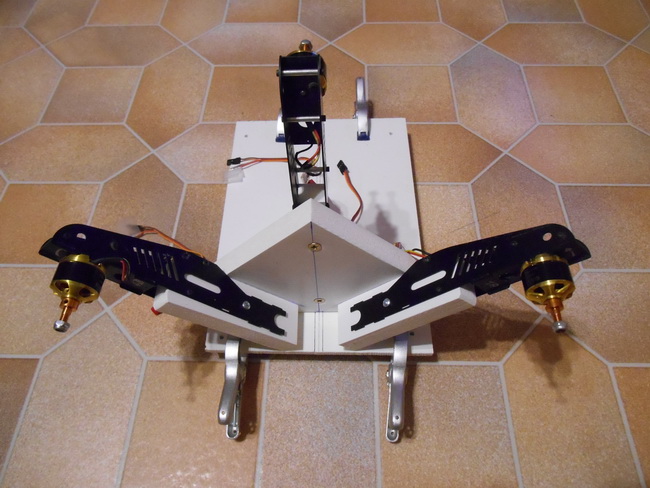
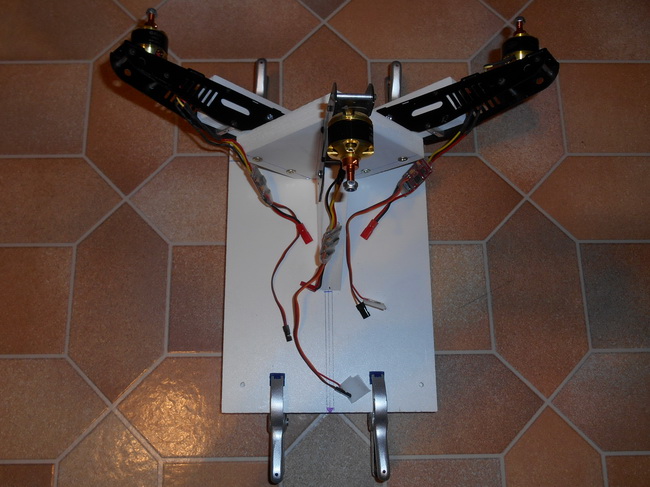
Allongement des câbles des moteurs pour mettre la connectique à l'abri dans la boîte étanche..
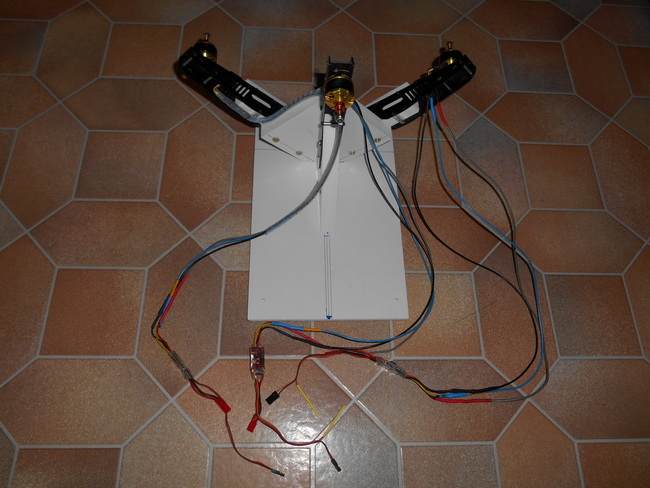
Positionnement de l'ensemble de propulsion sur le flotteur de test.

Les contrôleurs, moteurs et hélices (8 ") proviennent de l'ancien GAUI 330X.
Moteur SCORPION GAUI 1050 Kv GUEC GM410.
ESC GAUI GUEC GE010 10A.



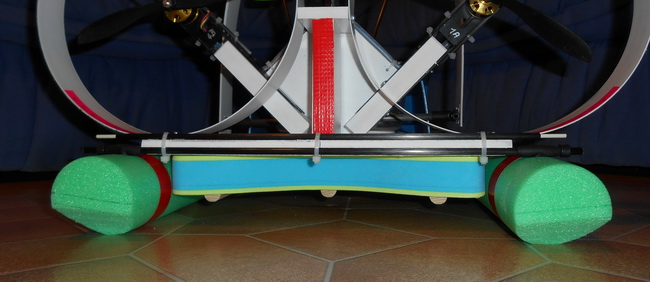
Le module de protection des hélices à l'arrière de l'appareil.


Première mise à l'eau plage de MARENNES le 14 novembre 2016.

Le placement de l'ensemble de propulsion très en arrière sur le flotteur permet de relever l'avant, mais on est un peu limite pour la flottabilité. Lorsque la vitesse augmente, l'eau passe à l'intérieur des cercles de protection des hélices et cela vaporise, au risque de détruire l'hélice. La marche arrière est délicate, car le phénomène s'accentue.




Vidéo des essais du prototype tri moteur et test d'un sauvetage .
le 14 novembre 2016 sur la retenue d'eau plage de MARENNES.
Ajout de deux cylindres en mousse pour modifier la ligne de flottaison avant de procéder à de nouveaux essais.

Finalisation de la décoration.







Plage de MARENNES le 22 novembre 2016.
Vidéo des essais du flotteur modifié. Cette fois, c'est l'avant qui embarque de l'eau, on approche du submersible ......
Le 28 novembre 2016.

Caractéristiques :
Poids 2700 grammes hors accu.
Dimensions hors-tout
Longueur : 90 cm Largeur : 54 cm Hauteur : 40 cm
Le 28 novembre 2016, vidéo de navigation en duo.
Le 21 décembre 2016





Le 16 février 2017 navigation à Marennes (17) des hydroglisseurs mono et tri.
Photos et vidéos BDC HENRI.
![]()
![]()